
How to Set up Honda HDS with Xhorse MVCI Pro J2534?
Xhorse MVCI Pro J2534 has been tested working with many j2534 compatible software including Honda HDS software. Here is the instruction to set up Honda diagnostic system software with MVCI pro cable.
Preparation:
*If don’t need newer 3.104 version, 3.102 is enough.
If need to use 3.104, requires first install HDS 3.102 then install 3.104.
*If you got other HDS version, free test by your side.
Procedure:
Video reference
Step 1: Install HDS 3.102
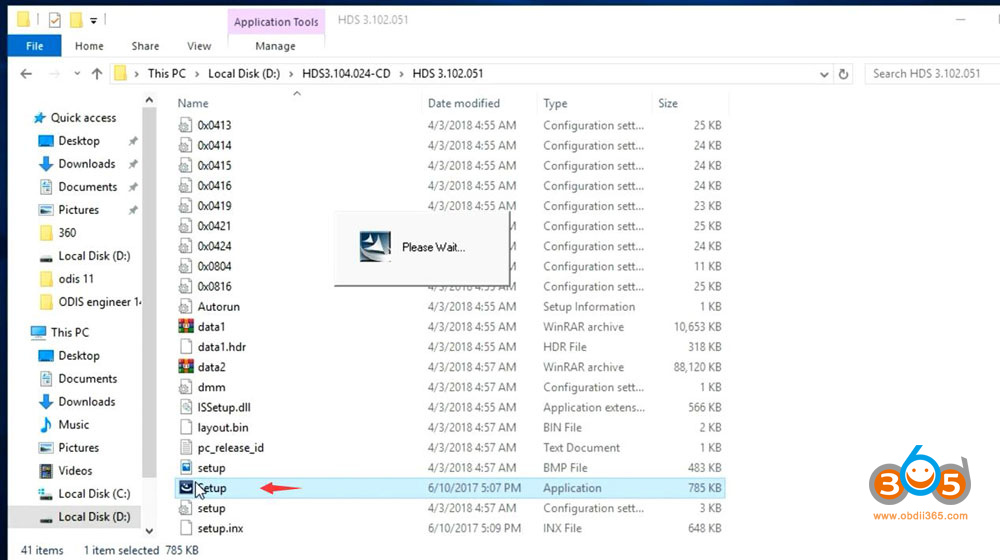
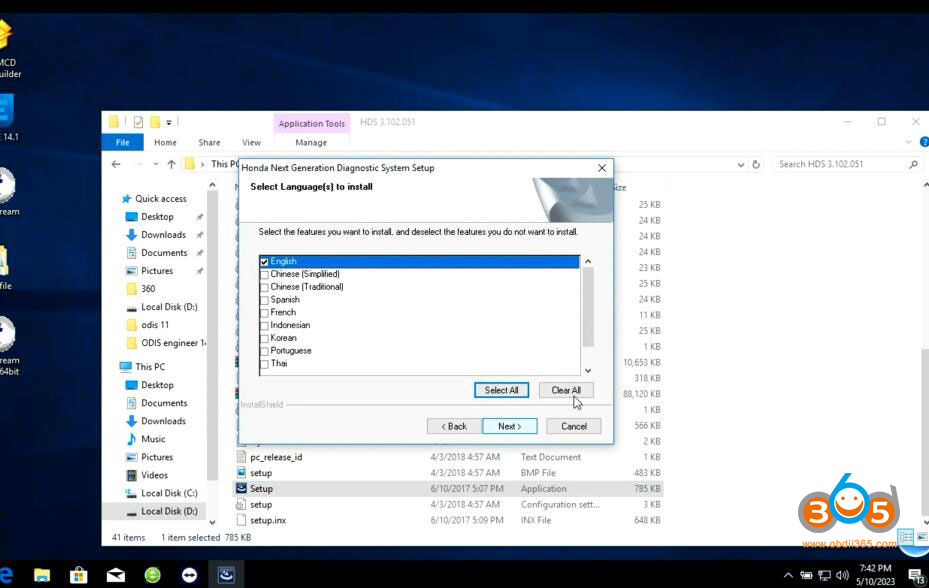
Install HDS 3.102 setup
Press Next
Accept license agreement
Select region- Other region
Select country
Enter dealer code: 123456
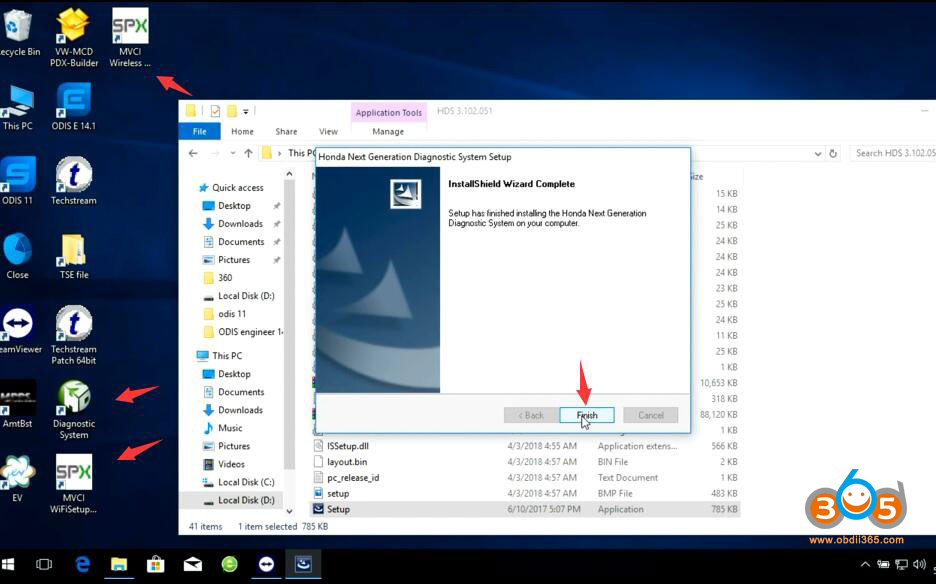
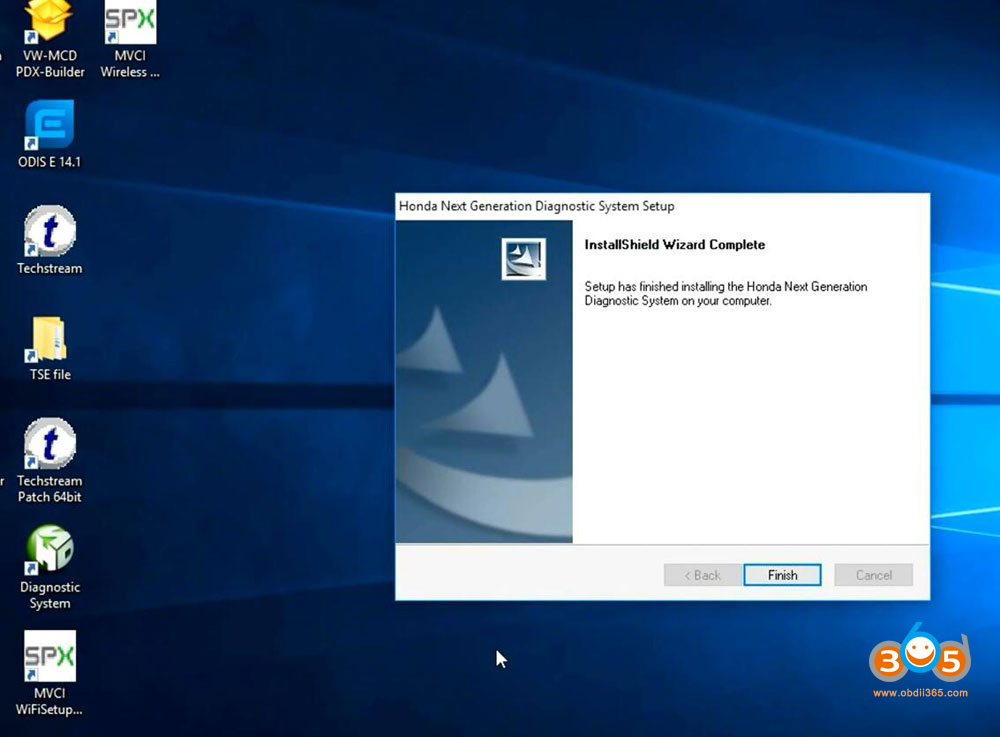
Finish installing HDS 3.102 software
Step 2: Install HDS 3.104

Install HDS 3.104.024 setup until finished.
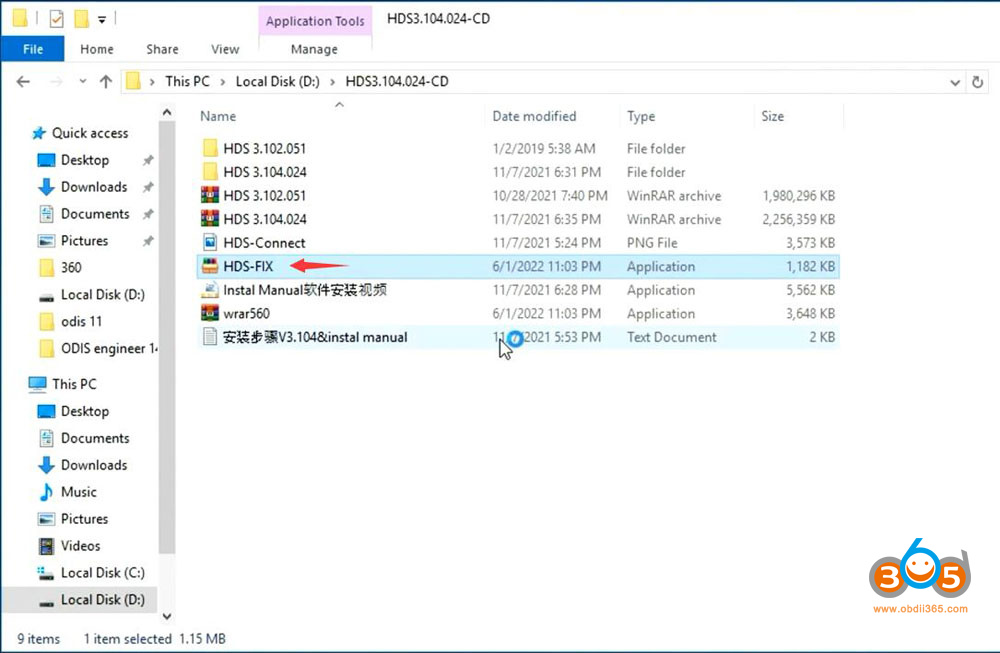
Run Honda FIX patch to crack HDS
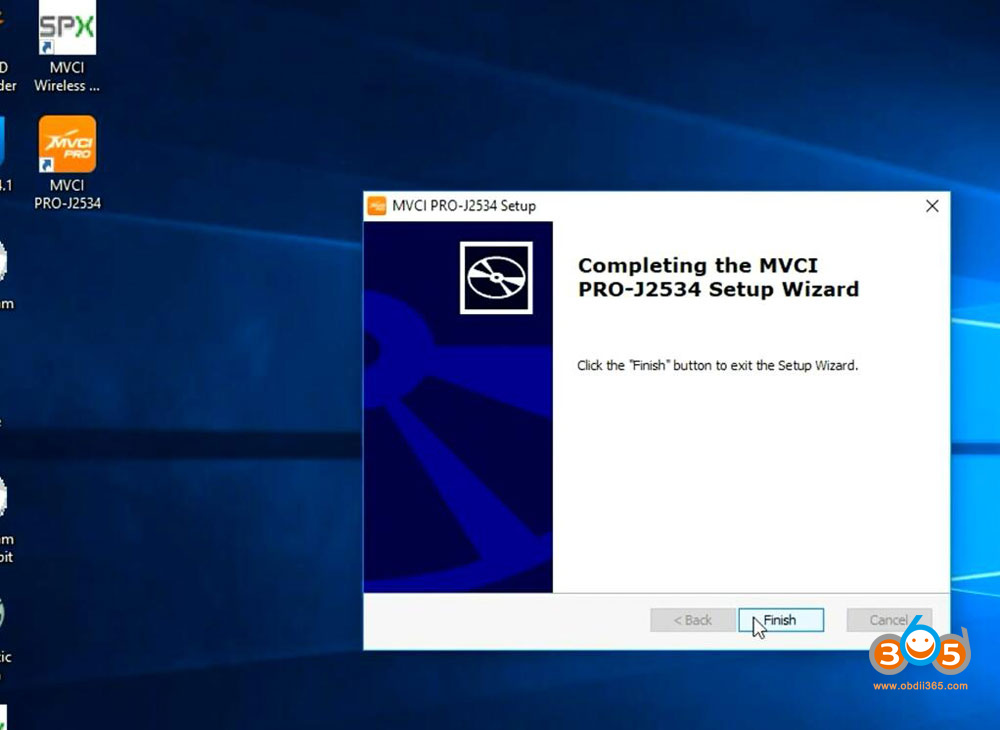
Step 3: Install MVCI Pro driver
Download and Install MVCI Pro driver
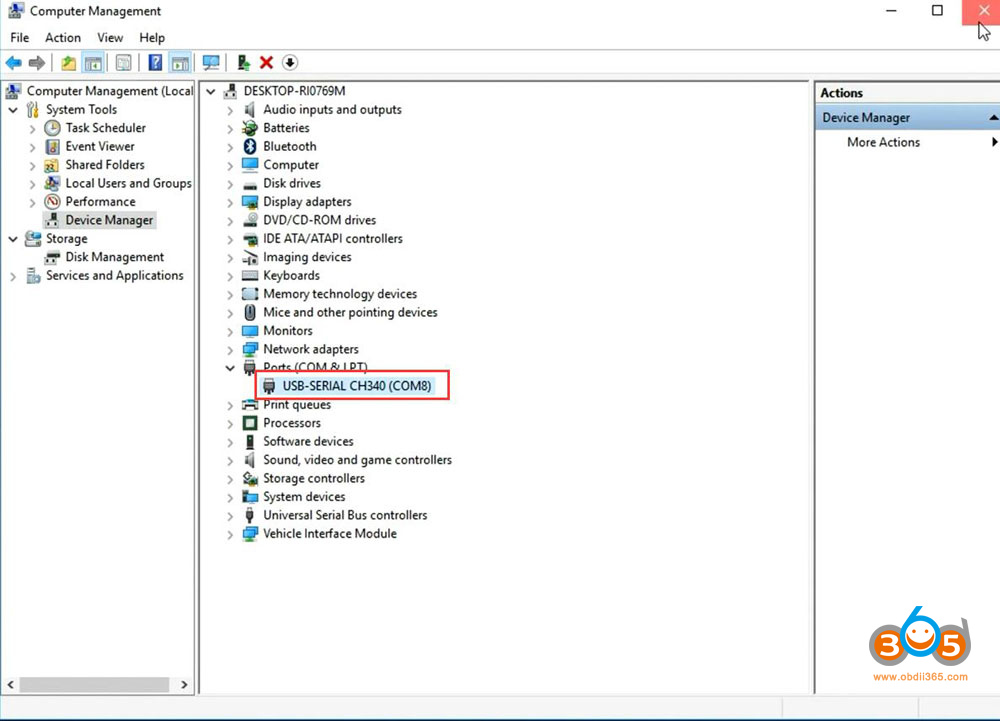
Check device is connected in Device Manager
Run MVCI Pro j2534 driver on desktop
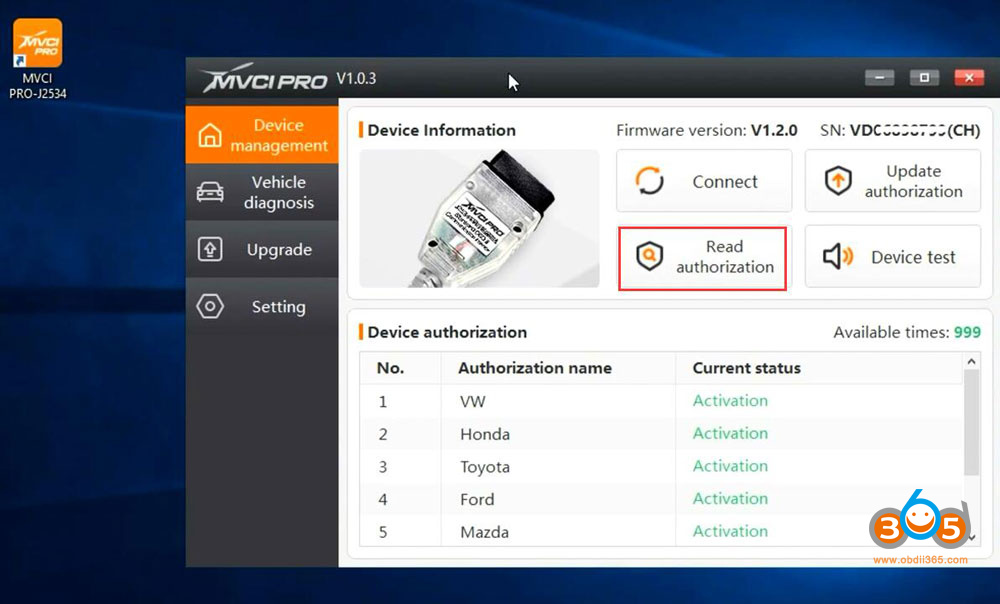
Check device connection status
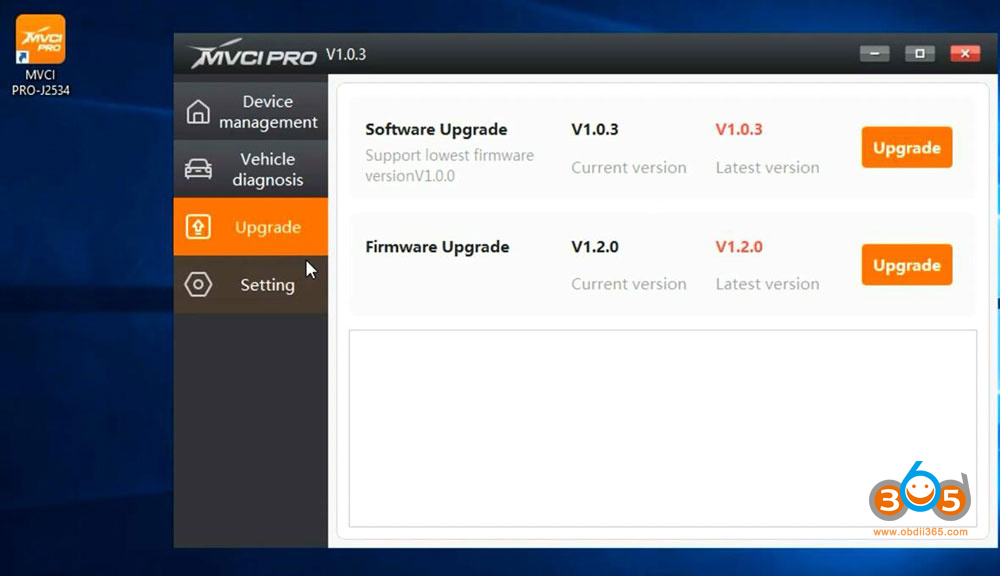
Make sure update software and firmware to latest version
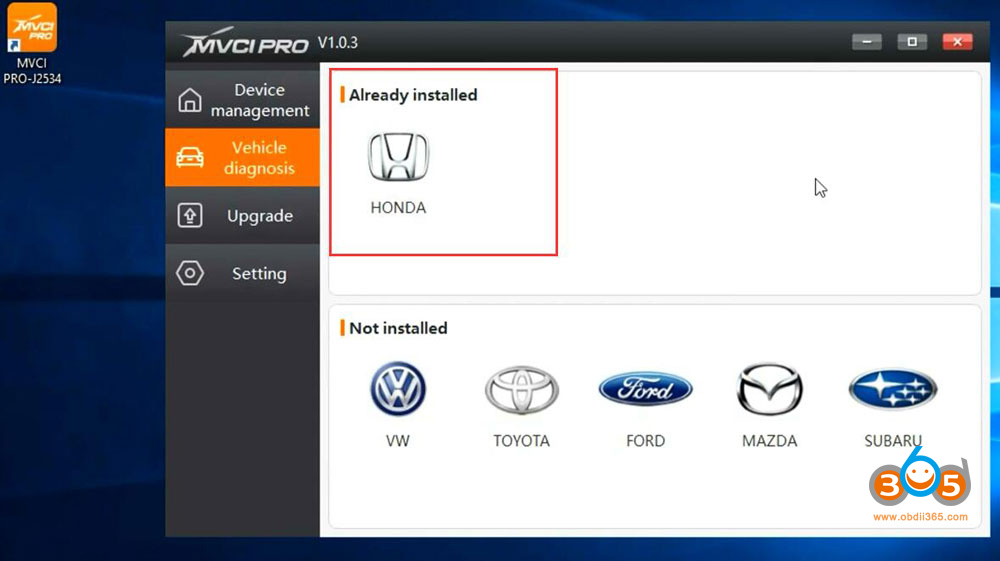
Install Honda driver in MVCI pro
Источник
Вторая жизнь китайского чудо-шнурка J2534
Давным-давно, когда деревья были большими и вариации комплектаций одной модели автомобиля можно было перечислить пальцами одной руки, был куплен диагностический адаптер, о котором сегодня пойдет речь. Творение неизвестного китайца получило название Mini-VCI J2534. Откуда он взялся доподлинно неизвестно, но позиционируется как интерфейс для работы с различными Тойотами, а так же как J2534 совместимый адаптер (спойлер — нет). В момент покупки его было достаточно для диагностики и ковыряния в мозгах автомобилей тех лет, но прогресс не стоит на месте и в нынешних реалиях он если так можно выразиться — «не вывозит». О том, можно ли с этим что-то сделать и пойдет речь ниже.
Итак, знакомьтесь — наш пациент снаружи и внутри:
 Обратите внимание на маркировку микроконтроллера LPC2119, мы к ней еще вернемся.
Обратите внимание на маркировку микроконтроллера LPC2119, мы к ней еще вернемся.
Внутри него живет 16/32 bit ARM7TDMI-S™ CPU, пара CAN-контроллеров, 2 UART’а и еще кучка полезной и не очень периферии.
Суть проблемы
Если закрыть глаза на мелочи в виде почти полного несоответствия стандарту J2534, есть у него проблемы гораздо хуже, а именно невозможность отправлять данные по протоколу ISO-TP длиннее
48 байт. С последним мириться было нельзя и в голове засела мысль, а что если получится сделать этот мир чуточку лучше.
Если кратко, как происходит передача данных длинной больше 8 байт по CAN-шине (длина сообщения CAN ограничена восемью байтами). Существует такой стандарт ISO15765, он же ISO-TP (Transport Protocol), который покрывает 2 модели OSI (сетевой и транспортный). Передача данных длиной более 7 байт выглядит так:
Источник отправляет First Frame (FF) с данными об общей длине передаваемых данных и первыми 6 байтами payload’а.
Приемник отвечает ему Flow Control фреймом, в котором говорит о минимальном допустимом времени между посылками CF (о них ниже) и количестве CF, после которого источник снова должен дождаться Flow Control фрейм.
Источник после приема Flow Control’а продолжает отправку данных фреймами Consecutive Frame (CF) с заданным интервалом о ожиданием следующего Flow Control (если об этом было сказано в пункте 2)
Что происходит на самом деле и почему ничего не работает нам поможет выяснить обычный анализатор CAN шины (Can Hacker/PEAK CAN и иже с ними). Итак, картина маслом — все смешалось, кони, люди. Приемник сказал жди от меня каждые 8 Consecutive Frame’ов Flow Control и шли мне каждый Consecutive Frame не менее чем через 10 мс, а шнурок мало того, что проигнорировал ожидание FC, так еще и на минимальную задержку между CF не обратил внимания.
Flow Control от приемника — 30 08 0A FFFFFFFFFF, где 08 — количество CF, после которого источник снова должен дождаться Flow Control фрейм, 0A — минимальное допустимое время между посылками CF.
Что мы имеем по факту — задержка около 1мс между CF, вместо желаемой 10мс и отсутствие ожидания Flow Control, что полностью ломает весь процесс передачи.

Ну и ладно, подумаешь, организуем свой ISO-TP с задержками и таймингами, благо шнур позволяет работать с сырыми данными CAN и посмотрим что получилось (гадость какая)

В шнурке используется преобразователь USB-UART FT232, который имеет некоторые проблемы при работе с USB 3.0. И проблемы эти — конские задержки, которые не настраиваются из драйвера, хотя на USB 2.0 все работает, но где вы сейчас найдете честный контроллер USB 2.0 в матери/ноутбуке. В общем, ручное форматирование тоже отпадает, задержки между CF не поддаются критике, работать это тоже не будет.
Остается крайняя мера — залезть внутрь и попробовать исправить кривой софт костылями, насколько это возможно. Не знаю как, но прямо по USB из контроллера можно вычитать и записать флеш память даже без разборки шнурка с помощью программы Flash Magic. После чтения загружаем прошивку в IDA, процессор ARM Little Endian архитектура ARMv4T. Немного помощи руками, создание недостающих регионов и прошивка готова к исследованию.
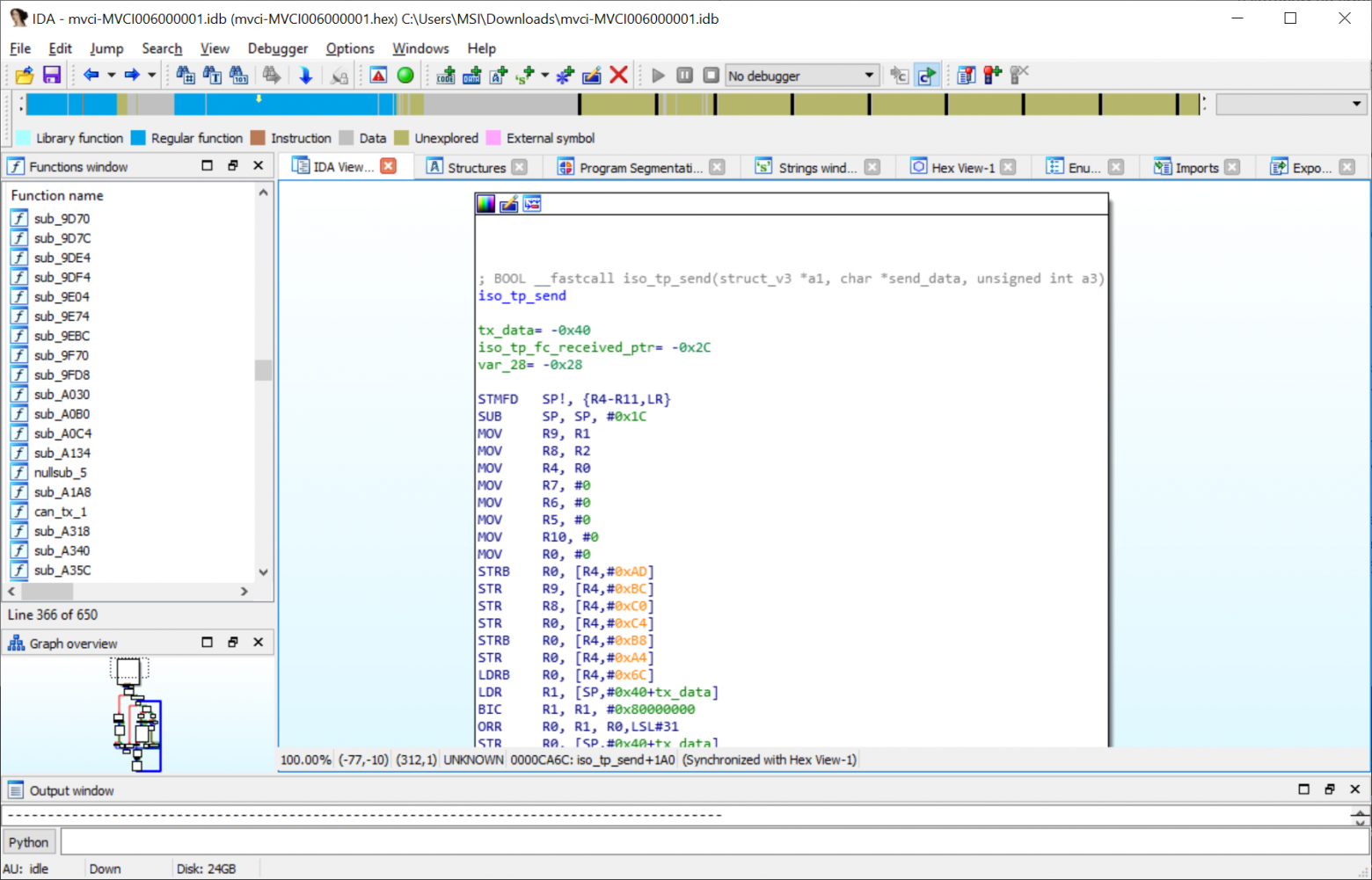
Функция с реализацией отправки данных по ISO-TP была найдена от обратного (CAN периферия — отправка — обертка — сама функция). Что же по исходникам — вот кусок кода с отправкой данных. То, о чем говорилось выше не предусмотрено вообще никак.
Как видно, Flow Control шнурок ждет всего один раз, а дальше даже не пытается соответствовать ISO-TP. Как только он получит FC, сразу же без задержек начинает слать остатки данных в Consecutive Frame’ах. Ладно, но может он хотя бы обращает внимание на данные из Flow Control? Ха-ха. Нет. Вот функция обработки приема данных по ISO-TP, нас интересует только прием Flow Control.
Как видим, просто выставляется флажок, что был принят какой-то flow control, а что там в нем нам не важно (мысли китайца).
Что же делать?
Дешево и сердито — засунуть простую задержку между отправкой Consecutive Frame’ов, чтобы приемник успевал отправить свой Flow Control там, где нужно и получил следующий CF уже после. Все что нам нужно, это найти место, в цикле с отправкой, куда можно засунуть переход в функцию с задержкой, благо мест таких полно, а замененные инструкции можно выполнить в новой функции, так что мы ничего не потеряем. Берем IAR, в нем есть поддержка именно такого процессора, чистый проект на ассемблере и пишем элементарный цикл
Конечный результат выглядит так — слева то, что было, справа то, что стало. Инструкция MOV R0, R4 перенесена.

Прошиваем и наслаждаемся прекрасной работой без сбоев.

Конечно, можно было сделать все по фен шую, и правильную обработку Flow Control фрейма, и честные задержки по желанию приемника, и ожидание остальных Flow Control’ов. Но результат в любом случае достигнут и терять время больше чем один вечер на такое желания нет.
Еще интересный момент — контроллер судя по всему китайский перемарк, т.к. определился программой по внутреннему ID как LPC2114, в котором, на минуточку, вообще нет CAN контроллера, если верить даташиту. Видишь CAN? И я не вижу, а он есть. Вот так вот.
Источник
Mini vci j2534 хонда
Диск с инструкциями, программой на русском языке
Диагностический адаптер Honda HDS является аналогом приборов GNA600 и Honda HIM, используемых в официальных сервисных центрах. Адаптер предназначен для всех автомобилей Honda и Acura с 1996 года выпуска по настоящее время.
Основные функции адаптера Honda HDS:
- Поддержка дилерского диагностического ПО — Honda HDS;
- Поддержка диагностики, активных тестов, кодирования;
- Поддержка моделей с 1996 по настоящее время, оснащенных разъемом OBDII/DLC3
- Высокая производительность, благодаря использованию ARM микроконтроллера.
Возможности адаптера Honda HDS:
- Считывание и расшифровка кодов неисправностей из памяти блоков управления;
- Стирание кодов неисправностей (очистка памяти);
- Вывод текущих параметров системы в цифровой форме (до 8-ми параметров одновременно);
- Вывод текущих параметров в графическом виде (любые 2 параметра одновременно по выбору диагноста);
- Комбинированный вывод данных (в графической и цифровой форме);
- Управление исполнительными устройствами;
- Сброс адаптивных коэффициентов из памяти блоков управления;
- Ведение логов — запись и сохранение в памяти массива цифровых параметров, соответствующих заданному ездовому циклу, с возможностью их последующего покадрового просмотра (в т.ч. в графическом виде);
- Специальные функции — изменение допустимых настроек блоков, программирование и пр.
Поддерживаемые электронные системы управления:
- PGM FI — система управления бензиновым двигателем;
- Diesel — система управления дизельным двигателем;
- IMA — система управления гибридной силовой установкой;
- AT — система управления автоматической коробкой передач;
- ABS — антиблокировочная система;
- TCS — антипробуксовочная система;
- VSA — система курсовой устойчивости;
- VTM 4 — система управления подключаемым задним приводом;
- 4 WS — система управления поворотом колёс;
- SH-AWD — система управления полным приводом;
- ATTS — система активного распределения крутящего момента;
- DBW — система управления электронной дроссельной заслонкой;
- EPS — система управления электрическим усилителем руля;
- IHCC — система круиз-контроля c функцией дистроник;
- HiDS — система круиз-контроля с функцией удержания полосы;
- SRS — система управления подушками безопасности;
- Keyless Access — система дистанционного доступа;
- R/C Engine Starter — система дистанционного запуска;
- TPMS — система контроля давления в шинах.
Поддерживаемые протоколы:
- K-Line ISO 9141
- KWP 2000 ISO 14230-4
- CAN 2.0B ISO 11898
- CAN ISO 15765-4
- Pass-Through J2534
Honda HDS j2534 — автомобильный сканер легко купить онлайн, заказать доставку по России и оплатить товар при вручении
Источник


